穿越机的调参
2025-02-04
更新历史
| 日期 | 版本 | 作者 | 更新内容 |
|---|---|---|---|
| 2025-02-04 | 1.0.1 | SJF | 添加了及时保存的提醒 |
| 2025-02-01 | 1.0.0 | SJF | 填写内容 |
每设置完一页都要点击右下角的保存按钮,否则修改内容会丢失。
连接地面站1
- 安装和打开BF固件的地面站,将飞控通过USB数据线连接至计算机。
- 点击右上角的连接

校准传感器
进入设置页,将飞机完全放平,点击校准加速度计。

打开端口
进入端口页,根据飞控官方给出的接线图打开端口并选择对应的外设2。
设置机架
进入电机页,选择机架类型QUAD X,电机协议选择DSHOT600,如果电调不支持可选择DSHOT300。
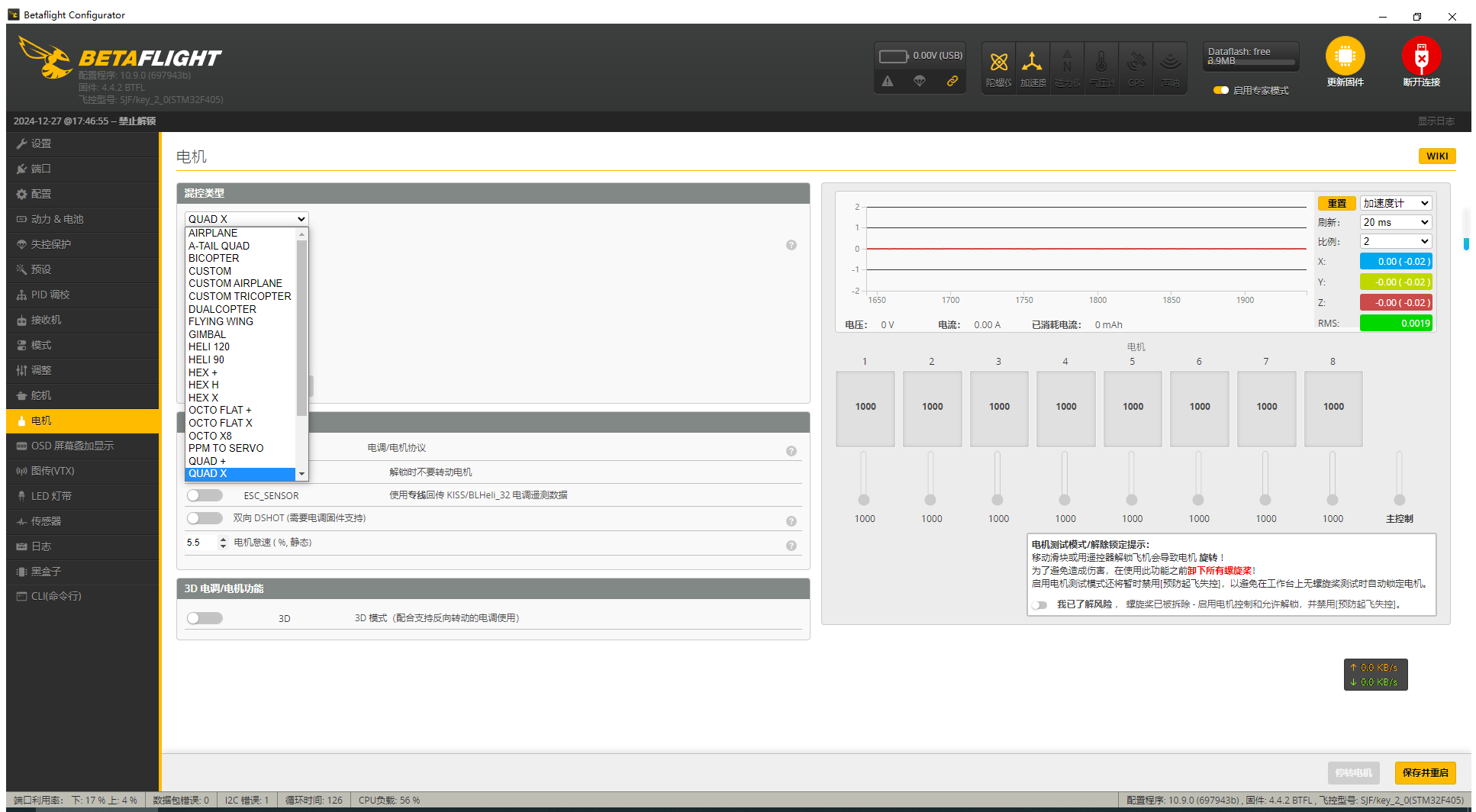
设置电调协议
电机协议选择DSHOT600,如果电调不支持可选择DSHOT300。

调整电机顺序
插上电池,按照地面站内的指引设置电机顺序,电机顺序要和示意图中相同。
调整电机转向
插上电池,按照地面站内的指引设置电机转向,电机转向要和示意图中相同。如果软件内无法更改电机转向,在电调上把该电机三条线中任意两条互换即可。
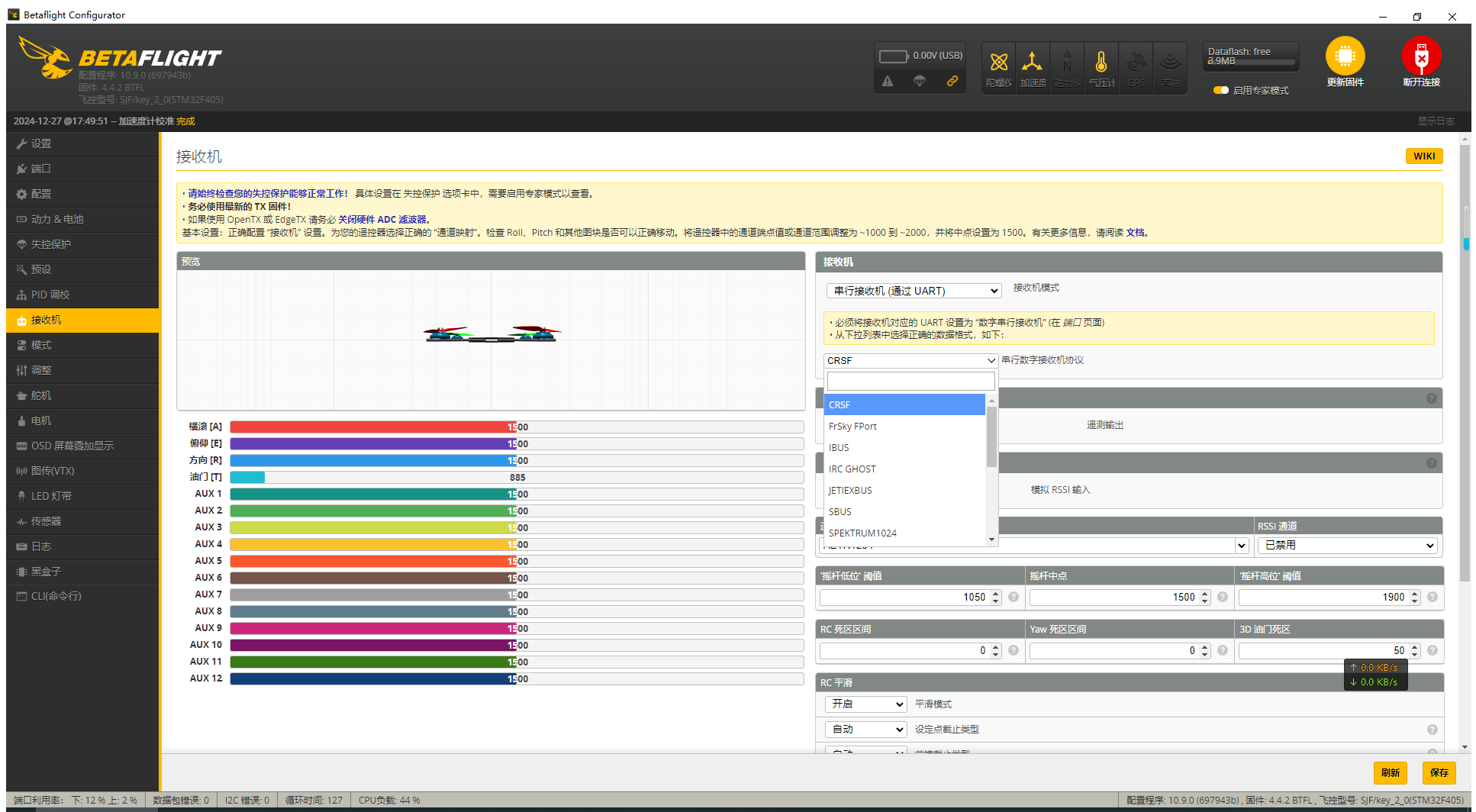
设置接收机
进入接收机页,选择串行接收机,然后选择CRSF协议。拨动遥控器的开关按钮观察通道值是否变化以及程序界面中的小飞机姿态变化是否正确。
设置模式
- 进入
模式页。 - 找到想要设置的模式。
- 点击“添加范围”按钮。
- 选择“自动”。
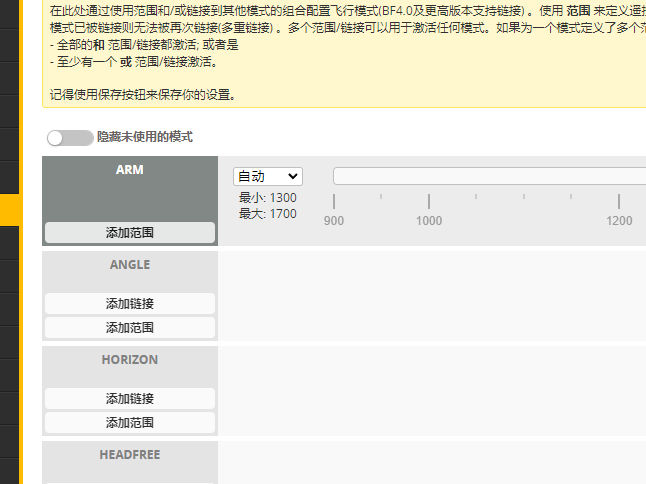
- 在遥控器上扳动想要控制选定模式的开关,软件会自动选择该开关对应的通道。
- 拖动黄色的进度条,将下方的小黄点在进度条范围内时。此时该模式为激活状态,同时标题处变成黄色。
各个模式的功能描述
| 英文 | 中文 | 说明 |
|---|---|---|
| ANGLE | 自稳 | 摇杆回中时,穿越机可自动回至水平状态,且对飞行姿态进行了限制 |
| HORIZON | 半自稳 | 摇杆比例未超过设定值时,穿越机按照自稳模式飞行。摇杆比例如果过大,穿越机就会像手动模式一样出现翻滚 |
| ACRO | 手动3 | 没有任何辅助的飞行模式,无姿态限制 |
| PREARM | 预解锁 | 开启预解锁的情况下才可以解锁 |
| HEADFREE | 无头模式 | 方向摇杆的前进永远对应解锁时的机头方向 |
| CAMSTAB | 相机云台 | 1、2号舵机搭建的云台会自动使相机保持当前角度 |
| BEEPER | 鸣叫 | 飞机通过电机和蜂鸣器发出响声,可用来炸机后寻找飞机4 |
| BEEPERMUTE | 静音 | 关闭所有的鸣叫声 |
| LEDLOW | 关闭LED | 关闭LED灯带 |
| FAILSAFE | 失控保护 | 主动进入失控保护模式,可用于测试失控保护设置是否正确 |
| AIRMODE | 空中模式 | 可使飞机0油门时在空中保持姿态 |
| 3D | 3D模式 | 油门中位为0,向上推时飞机向下推动气流使自身上升,向下推时飞机向上推动气流使自身加速下降5 |
| FPV ANGLE MIX | FPV角度混合 | 会改变横滚和偏航的控制逻辑 |
| BLACKBOX ERASE | 黑匣子擦除 | 黑匣子擦除 |
| FLIP OVER AFTER CRASH | 反乌龟 | 用于炸机后翻身 |
| VTX PIT MODE | 图传维修站模式 | 使图传进入维修站模式,发射功率变得极低 |
| PARALYZE | 瘫痪 | 触发后飞机无法解锁,只有重新上电才会恢复 |
| GPS RESCUE | GPS救援 | 通过定位功能使飞机自动飞回来,有能力重新控制飞机后应该关闭此模式接管飞机的控制权6 |
| ACRO TRAINER | 手动训练模式 | 带姿态限制的手动模式 |
- 在至少设置
解锁和自稳两个模式后才可以起飞7。